
T1: Protection of Vulnerable Road Users
Transport Use cases
This use case aims to assist individuals with disabilities, such as visually impaired persons, during their urban journeys. The UC investigates how B5G/6G networks can support advanced applications for this scope, and which advanced B5G/6G network features can be exploited by application developers. It includes the experimentation of roadside infrastructure that is battery-powered and sourced with renewable energy.
The focus of the experimentation is on a road intersection where a Road Side Unit (RSU) equipped with perception sensors, such as cameras and LiDARs, and B5G/6G connectivity is installed. The RSU monitors the intersection using its sensors, and the information from the sensors is used to detect vehicles, pedestrians, and other road users and to track their movements.
The perception information is complemented by data shared by connected vehicles and pedestrians. In particular, some vehicles can be equipped with an OnBoard Unit (OBU) and they can share their position, and potentially other available data, over the B5G/6G network. Pedestrians may also share their position through their smartphones using standard C-ITS messages via an app.
The information gathered from the road intersection is provided to a Digital Twin that resides on the edge server. The Digital Twin is responsible for estimating the risk level by leveraging all the collected data. The computed risk level is used to provide feedback to the visually impaired people to enhance their safety in dangerous situations, such as when crossing the road. A risk notification is sent via B5G/6G network to the smartphone, which alerts the user using vibrations or sounds.
The RSU is powered by a solar panel, and it is equipped with a battery to prolong operating time. Some of the processing done by the RSU (e.g. detection and tracking) is based on AI algorithms that are computationally intensive. It is likely that the RSU will run out of power if intensive computation runs 24/7.
For this reason, orchestration solutions are implemented. To save energy at the RSU and keep it active, sensor data processing can be offloaded from the RSU to the edge server when needed. The orchestration automatically switches applications between the RSU and the edge server based on policies that take into account network, computing, and energy metrics that are continuously monitored. The orchestration preserves the application context when moving them in order to avoid information gaps. Moreover, the energy-aware information will be exposed through open and standard APIs, enabling optimal integration within the B5G/6G network.
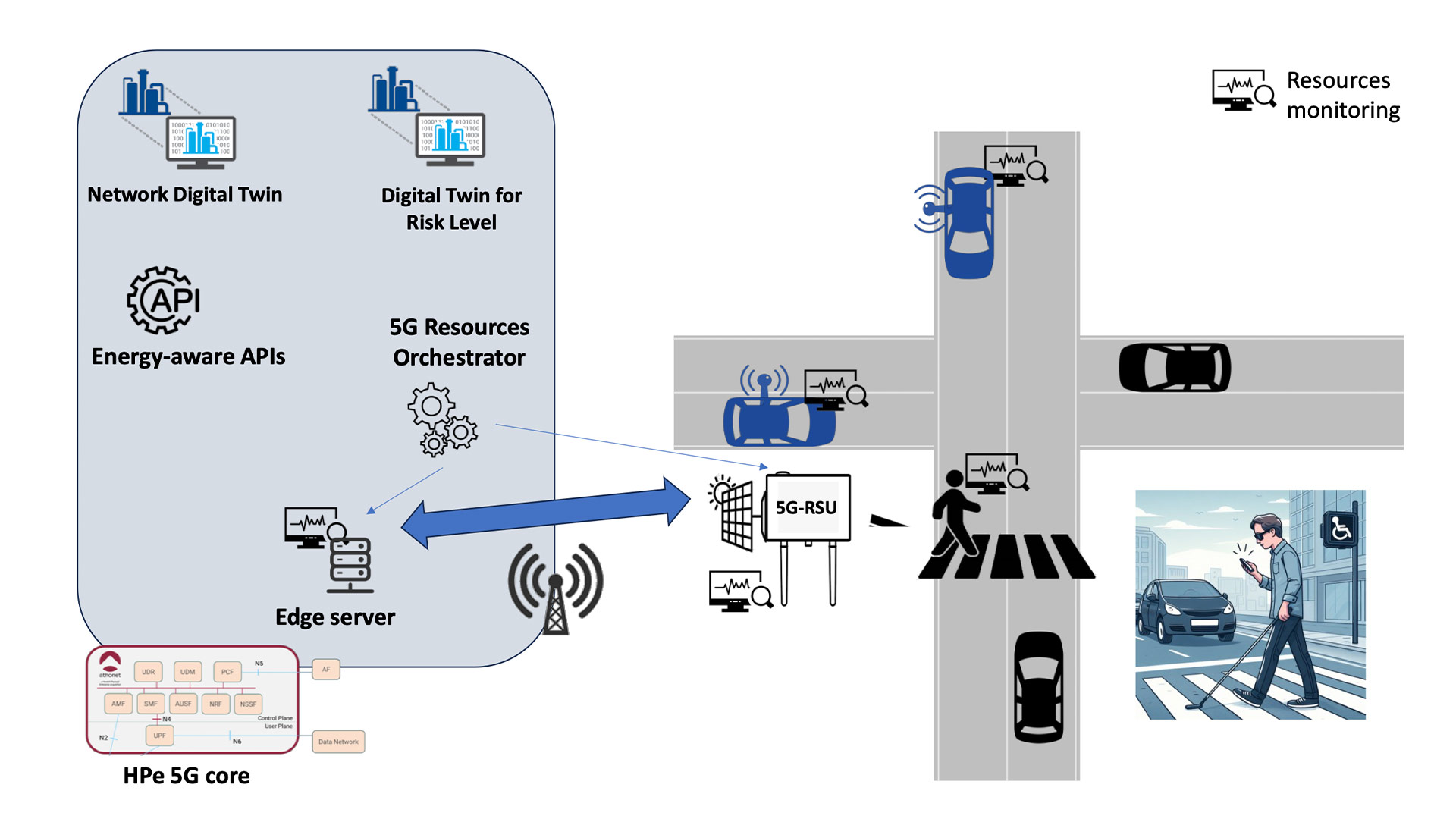
The high-level architecture of the use case is shown in the figure below. On the right, there is depicted the road intersection with the relevant actors (i.e., RSU with sensors, vehicles, connected vehicles, pedestrians, visually impaired people). On the left, the core and the edge segments are shown. At the edge server, the main components of the UC are deployed: i) the orchestrator for network and computing resources, ii) the energy-aware APIs for collecting energy metrics, iii) the Network Digital Twin to provide the current status of network resources, iv) the Digital Twin for risk level estimation.
The coverage of the junction will be ensured by a dedicated private mmW network operating alongside the standard public 5G infrastructure. The experimentation will evaluate how to best combine the two networks, assessing their ability to work together seamlessly and identifying the respective strengths and limitations of each solution.
T2: Enhancing Urban Security with UGV Monitoring
The second use case of the transport domain targets urban areas where additional safety support is required, such as urban parks. The main actor of this UC is an Unmanned Ground Vehicle (UGV) that monitors the surrounding area and intervenes upon request of citizens. The UGV intervention can be requested using a dedicated app or by directly interacting with the UGV through a button. The UGV includes perception sensors (e.g., cameras) to analyse the environment and to identify potentially illegal/suspicious activities. Scene recognition is used to verify the incident and to notify the responsible authorities.
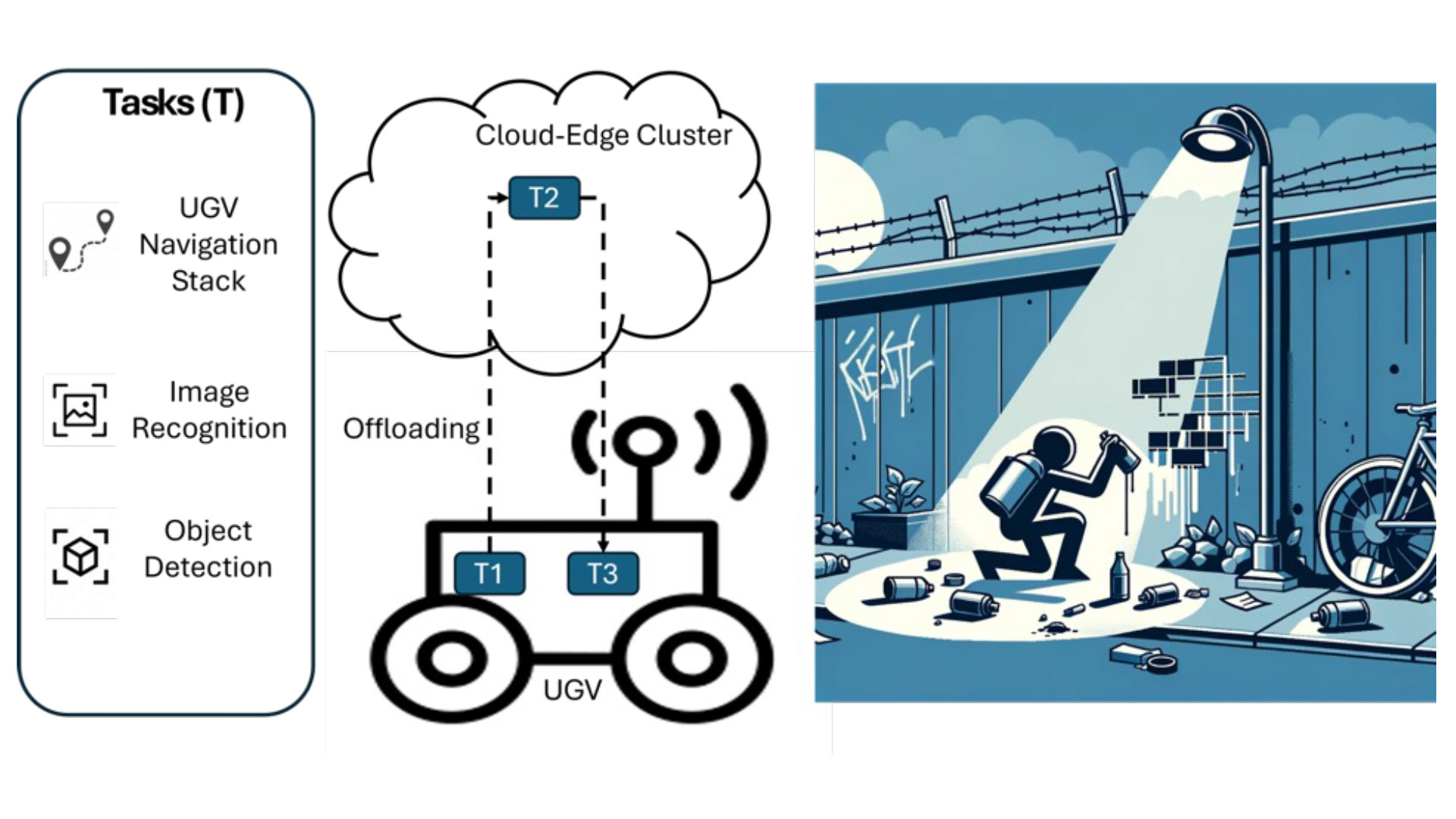
The image detection and recognition are computationally intensive tasks, and they can significantly drain the UGV battery. To extend the operating time of the UGV, the TUC considers offloading tasks from the AGV to the edge server when feasible. Task migration is performed seamlessly by an orchestrator that considers energy and network metrics. The orchestrator needs also to manage network resource utilization as tasks related to sensor processing are moved to the edge server. Therefore, additional uplink bandwidth for sensor data may be required to the UGV.
Moreover, the use case considers the need for a low-latency communication channel for teleoperation for cases in which the UGV must be tele-operated, for example, if the UGV is stuck in a position and manual guidance is needed.
The following figure depicts the high-level architecture of the use case. The UGV, with its sensors, monitors the target area. Applications are migrated between the AGV and the edge server to offload AGV workloads and extend battery life.
Also in this case, both a public and a private network will be used. While in the previous use case the focus was on their combined operation, here a comparative assessment will be carried out to evaluate the possibilities and limitations of each network individually, with the analysis tailored to the specific requirements of the use case.
T3: Wireless Signalling on Rail Tracks
This use case demonstrates how B5G/6G technologies can enhance railway signaling by complementing the operation of traditional hardwired infrastructure with advanced wireless communication and sensing capabilities. The objective is to ensure safe, reliable, and resilient train operations through real-time signaling and obstacle detection. The platform integrates multiple technological enablers, including Integrated Sensing and Communication (ISAC), network slicing, and point-to-point communication between trains, deployed within the TUC testbed infrastructure.
The system comprises two trains travelling one behind another on the same track. The front train is equipped with ISAC modules, enabling continuous monitoring of its own position, speed, and integrity. The train on the back maintains safe separation through redundant communication links, receiving signaling data via both the terrestrial B5G/6G network and a direct connection to the preceding train.
Track-side LCX cables support both communication and sensing functions by transmitting 5G signals and analyzing their reflections to detect train presence and track occupancy. The O-RAN units deployed along the line act as redundant access points, ensuring reliable connectivity in case of coverage variations.
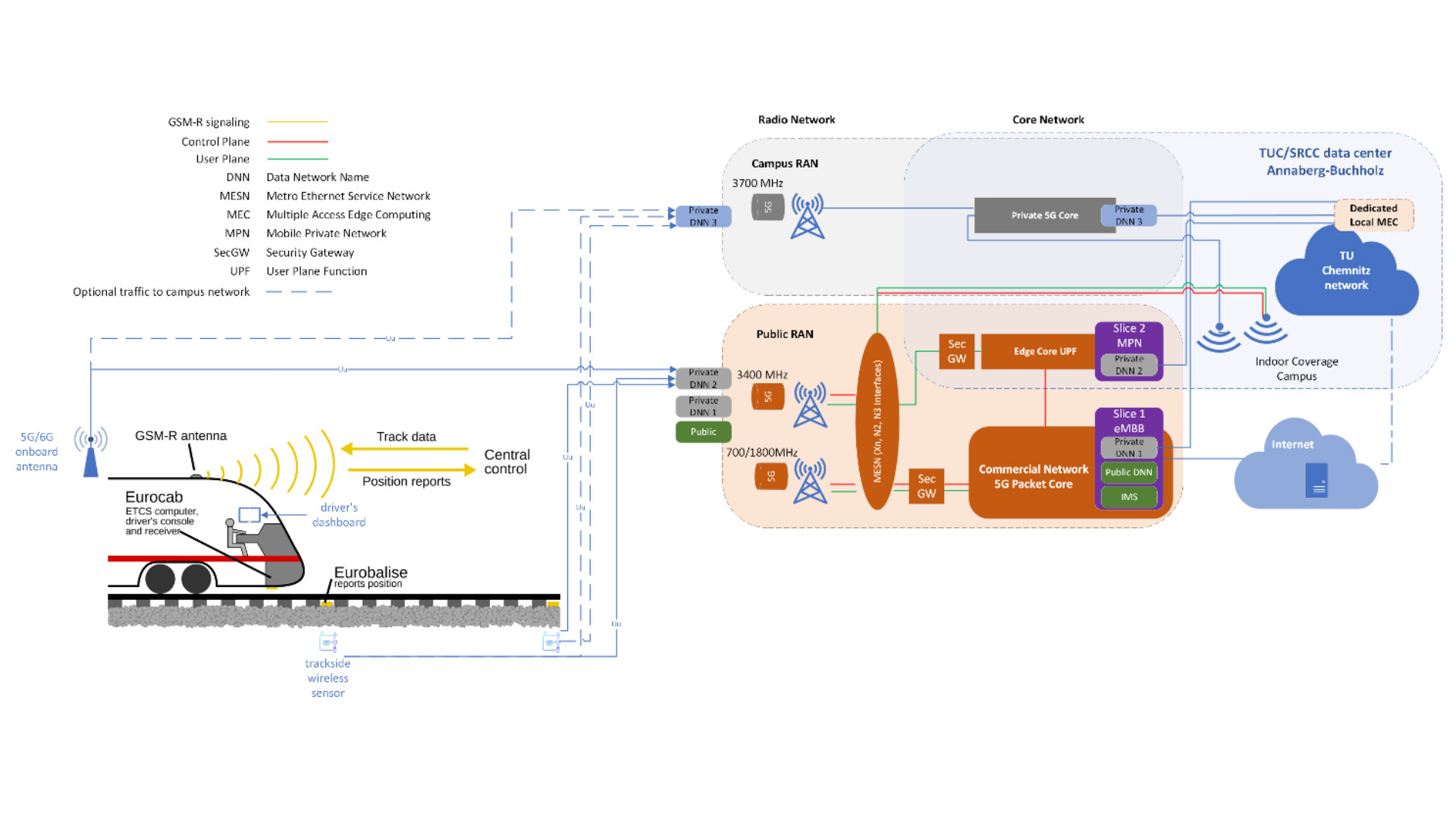
The figure below depicts the high-level architectural view of the railway use case. The TUC network supports the railway communication and sensing functions, enhancing their operation with advanced capabilities.
T4: Tele-operation as a back-up to autonomous driving
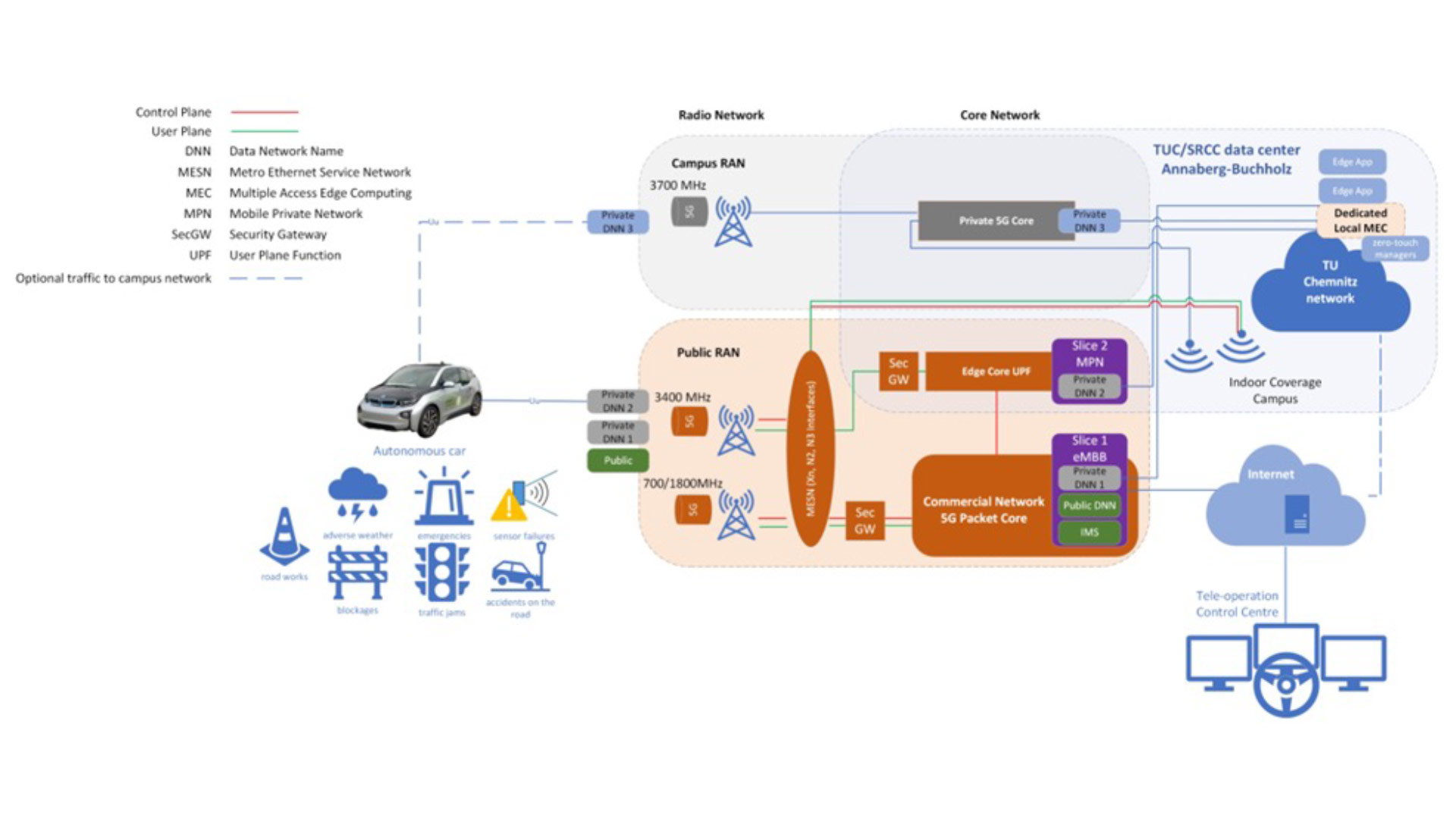
The “teleoperation as a backup to autonomous driving” use case demonstrates how tele-operation can serve as a reliable backup when an autonomous vehicle encounters conditions where self-driving is no longer safe or effective (e.g. adverse weather, construction zones, or complex traffic). The concept relies on a B5G/6G-enabled communication platform that ensures seamless switching between autonomous and tele-operated modes, supported by real-time video streaming, V2X situational awareness, and distributed AI-based decision logic.
The tele-operation system integrates vehicle sensors, edge/cloud computing resources, and a remote-control center where a human operator can safely take control when needed. Communication between the vehicle and the operator is maintained via a low-latency 6G link supported by the TUC testbed, while additional context awareness is provided through V2X data fusion and AI-based event detection.
T5: Port logistics and transport operations optimization and safety
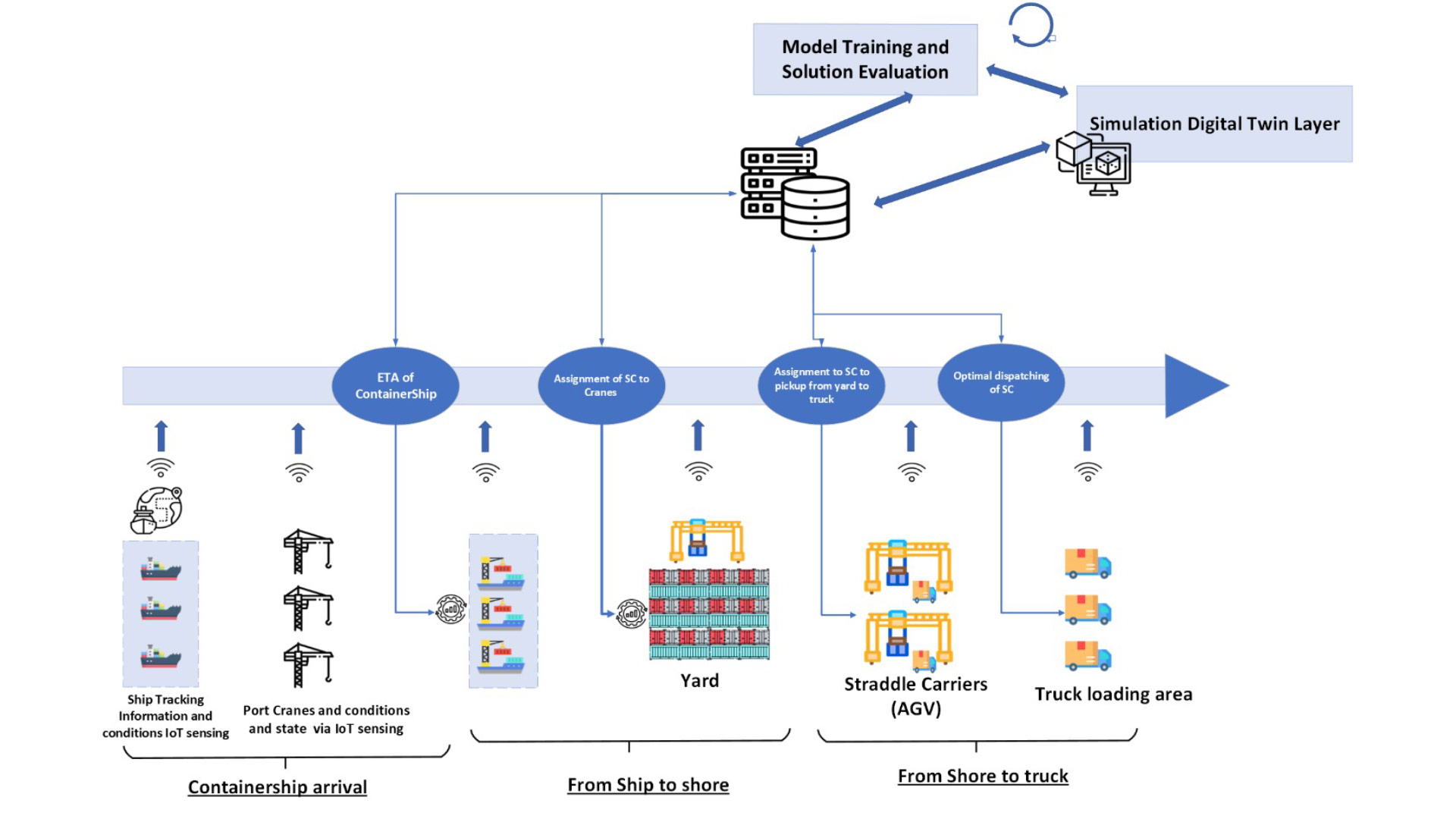
The use case of the Port of Thessaloniki in AMAZING-6G is focused on the operations occurring in its Container Terminal (ship-to-shore and shore-to-truck operations). Containers in ThPA S.A. are being handled 24 hours a day, 361 days a year at the designated area of the Container Terminal in the western part of Pier 6 (quay 26). It is part of the Free Zone and it extends in a 550m long and 340m wide area (352.000 m2) with a storage capacity of 5,200 TEU in ground locations while it can serve vessels with a draught of up to 12 meters. The Container Terminal is fully equipped with modern container handling equipment while it features technical facilities and an experienced technical support team.
This use case aims to foster operational efficiency, safety, and human-machine interaction, by reducing potential disruption of operations and the environmental footprint of port logistics and transport operations. This is achieved by enabling real-time, massive twinning, by extending a Digital Twin platform developed for process monitoring and tele-operation. The platform will be tested in a pilot that covers an end-to-end port process, i.e., from vessel unloading to loading trucks.
Use case
- Protection of Vulnerable Road Users
- Enhancing Urban Safety with AGVMonitoring
- Wireless signalling on rail tracks
- Teleoperation as a backup to autonomous driving
- Port logistics and transport operations optimization and safety
Sustainability aspects (i) Environmental, (ii) Societal, (iii) Economic
(i) reduced energy consumption and carbon footprint, cleaner urban areas, reduced electronic waste;
(ii) reduced accidents, reduced degradation of urban areas, minimal disruption of services (rail, autonomous vehicles)
(iii) reduced costs for healthcare, vandalism, theft, and negligence, more effective use of personnel, more revenue from new and more available services (rail, autonomous vehicles, port operations)
Related sites
Italian
Italian
German
German
Greek